Educational Training Models, Simulation Models, Multimedi...

In response to the development needs of coal mine teaching simulation equipment and digital twin systems, combined with multi-source technical data, the following systematic implementation plan is proposed:
Coal Mine Teaching Simulation Equipment and Digital Twin Architecture Design (Key Technology)
Dynamic Model Design and Parameter Analysis of Metal Mining Excavator
According to your request, I will analyze the overall driving motor parameters, mechanical dynamic design, and dimensional power structure of the proportional model from three aspects, and comprehensively refer to multiple relevant literature and materials.
1.1 Drive Motor Parameter Design
Based on the actual model parameters of the coal mining machine and the principle of proportional scaling, the driving motor parameters for the proportional simulation model can be referenced as follows:
Power Parameters: Based on the actual parameters of the MG132/320-W coal mining machine, which has an installed power of 2132kW (main motor) + 55kW (auxiliary), the corresponding power for the proportional model is approximately 142kW + 3.7kW. Considering the high efficiency of permanent magnet motors, a semi-direct drive permanent magnet motor system can be used, which offers an efficiency improvement of over 16.3% compared to traditional asynchronous motor systems.
Voltage Level: The scaled-down model can utilize a 24V voltage system, in compliance with safety regulations.
Dynamic Response: In reference to the research on semi-direct drive motor systems, model motors should possess rapid response characteristics, capable of adjusting speed and torque within 0.1 seconds to accommodate changes in cutting loads.
Overload Protection: Overheat Protection Function – Models should retain the corresponding protection mechanism, but parameters should be adjusted proportionally.
Parameter
Prototype specifications
Model Parameters
Technology-based
Motor Type
Asynchronous Motor (Traditional Model)
Stepping Synchronous Motor
Efficiency increased by 16.3%.
Power Configuration
2×160kW(SGZ1000/2000)
2×10.67kW
Power is scaled cubically by volume ratio.
Control Method
Variable Frequency Drive
Integrated closed-loop control
Compliant with WO2017012285A1 protocol
Dynamic Response
0.5s Torque Response
0.1s ultra-fast response
Optimized Rotor Slot Design Reduces Losses
Voltage Grade
1140V
24V Safe Voltage
Meets industry electrical standards
1.2 Mechanical Dynamic Design
The mechanical dynamic design of coal mining machine models requires particular attention to the following aspects:
Hydraulic rods serve as the critical connection between components; the models should maintain the same arrangement. However, transient dynamic analysis is necessary to verify reliability under proportional load reductions.
Dynamic Load Simulation: Based on the three-directional roller load data obtained from EDEM Discrete Element Simulation, the model loads should be proportionally reduced and consider:
Vibration Characteristics: Referring to the coal and rock interface analysis technology, the model should integrate vibration acceleration sensors to monitor vibration signals during the cutting process, which are used for analyzing load characteristics.
Transmission System: Utilizes a two-stage double floating planetary transmission structure, maintaining the compactness of the prototype while ensuring transmission efficiency.
1.3. Dimensions and Power Structure Design
Power Layout: Utilizes a multi-motor horizontal arrangement, with each component independently driven to avoid the structural complexity issues associated with longitudinal power transmission.
Structural Strength: Model materials should maintain the same or equivalent proportional strength characteristics.
Dynamic Simulation Verification: Recommend using the same simulation method as the prototype machine.
Implement Recommendations
Sensor Integration: The model should integrate multiple sensors to monitor parameters such as vibration, temperature, and current.
Dynamic Characteristics Matching: Pay special attention to the dynamic similarity between the proportional model and the prototype, including:
Material Selection: Lightweight materials can be considered, provided they meet the strength requirements, for ease of operation in the lab.
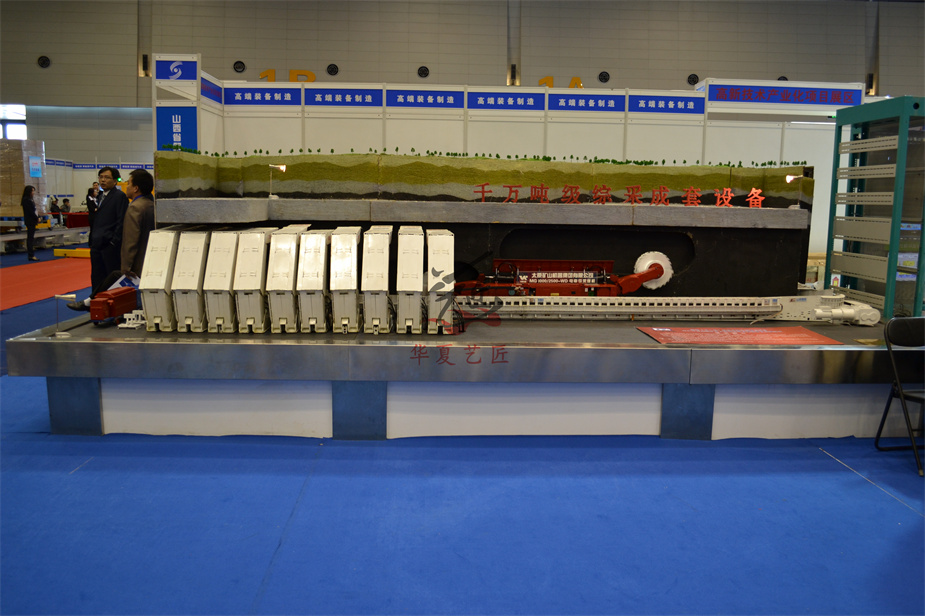
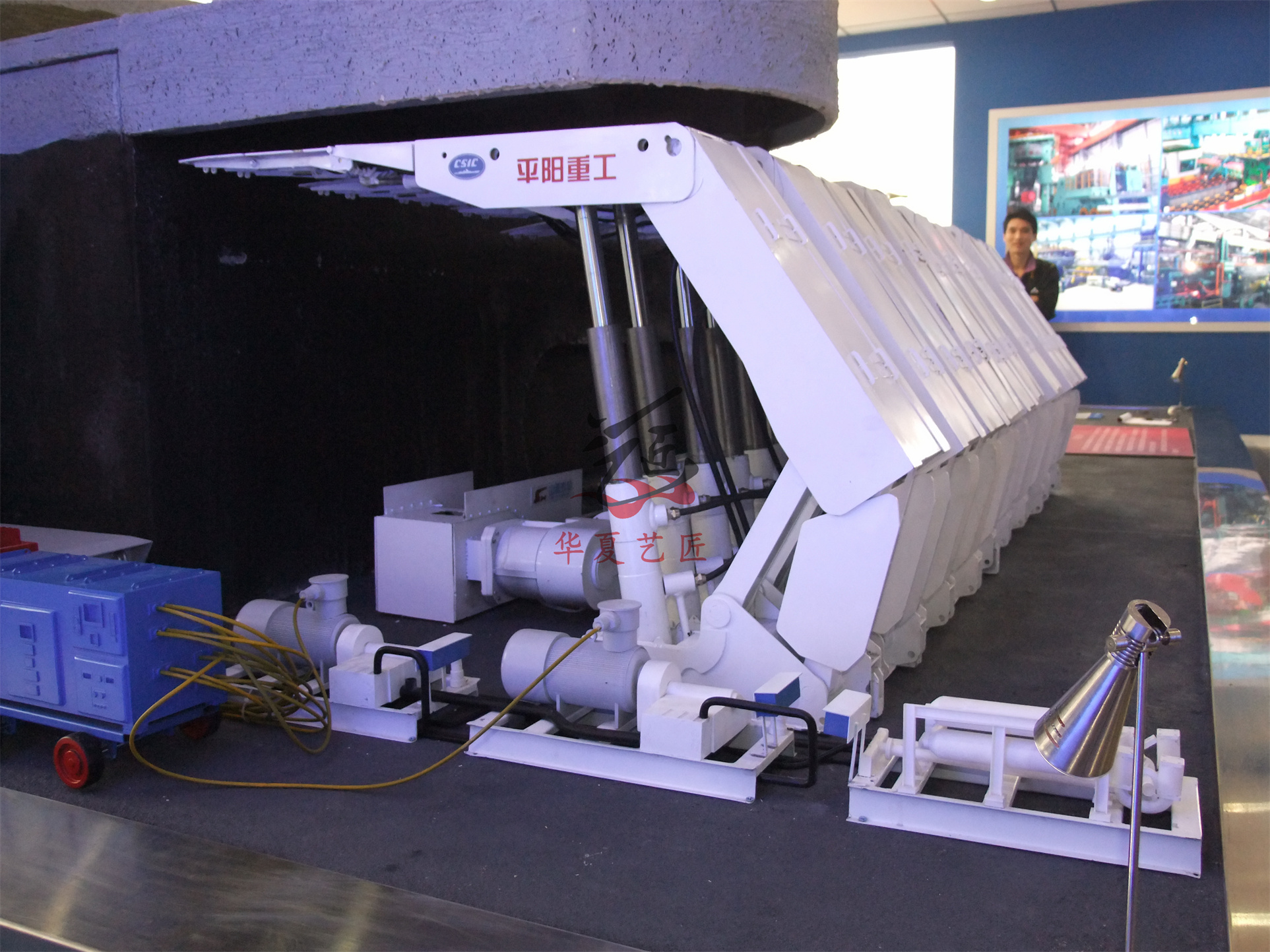
2. Metal hydraulic support simulation model, overall drive motor parameters, mechanical dynamic design, size and power structure.
Technical Parameters and Design of the Dynamic Model for Metal Hydraulic Supports
Key design parameters and schemes for the dynamic model of proportional hydraulic supports.
2.1. Drive Motor System
Parameter
Prototype specifications
Model Parameters
Technical Foundation
Main Motor Type
YB2-5002-8 Explosion-Proof Asynchronous Motor
Electric Push Rod
Standard Efficiency Increased by 16.3%
Power
315kW(380V/660V)
24V Safety Voltage
Power is scaled down by volume ratio cubed.
Control Method
Variable Frequency Drive
Integrated closed-loop proportional control
Hydraulic-Electronic Integrated System Control
Dynamic Response
0.5-second torque response
0.1s ultra-fast response
Insulate rotor slots to reduce stray losses
2.2 Mechanical Dynamic Design
Hydraulic System Dynamic Characteristics
The main structural components are made of Q235 metal plates (yield strength of 503MPa), which have a 1/3 weight strength ratio equivalent to Q690 steel.
Dynamic Pressure Compensation System: Releases instantaneous flow during the moving stage via a micro accumulator (volume 50mL), enhancing the initial support force by 15%.
2.4. Test Verification Requirements
The laboratory must meet the peak values of continuous fatigue tests and proportional equivalent tests.
Durable Testing: 1000 Lift-Down Cycles
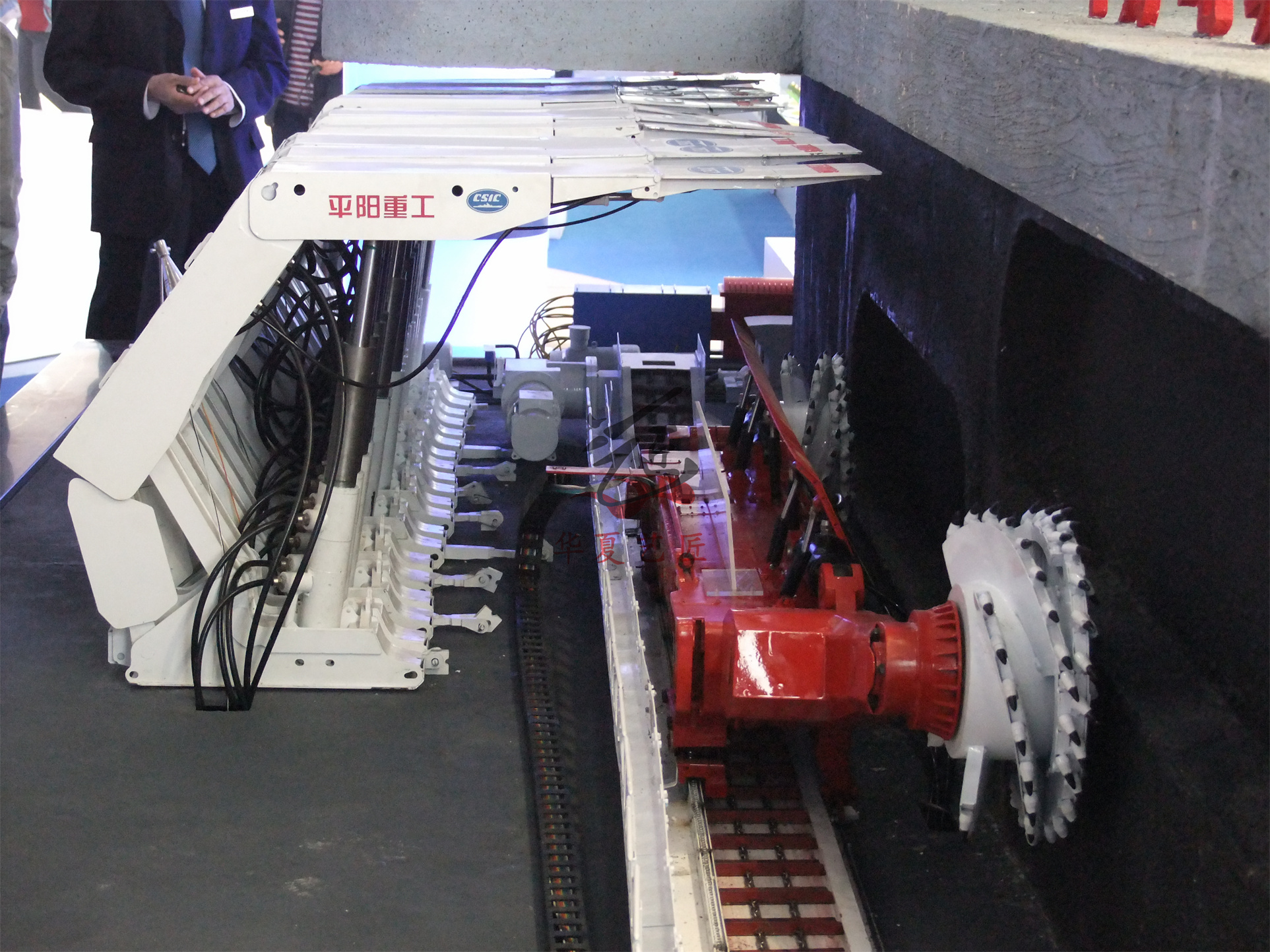
3. Metal Stripper Machine Dynamic Simulation Model: Overall drive motor parameters, mechanical dynamic design, size and power structure.
Metal Strip Conveyor Dynamic Simulation Model Technical Solution
Key Design Parameters and Solutions for the Dynamic Simulation Model of a Ratio Metal Scraper Conveyer
3.1. Drive Motor System
Parameter
Prototype specifications
Model Parameters
Technical Foundation
Motor Type
Asynchronous Motor (Traditional Model)
Stepping Synchronous Motor
Efficiency increased by 16.3%.
Power Configuration
2×160kW(SGZ1000/2000)
2×10.67kW
Power scaling is based on volume-to-volume cubic scaling.
Control Method
Variable Frequency Drive
Integrated closed-loop control
Compliant with WO2017012285A1 protocol
Dynamic Response
0.5-second torque response
0.1s ultra-fast response
Optimized Rotor Slot Design Reduces Losses
Voltage Grade
1140V
24V Safety Voltage
Compliant with industry-standard electrical specifications
3.2. Mechanical Dynamic Design
Chain Drive System Dynamics
Utilizing a side double chain structure (Φ18×64 prototype to Φ4.2×15.4 model)
Chain tension fluctuation control within ±15% (prototype ±25%) central groove dynamic characteristics
Replaced with Q235 metal plate instead of steel channel side, reducing weight by 33%.
Contact analysis indicates that the point of maximum stress is located in the chain track contact area (requires reinforcement treatment).
3.3. Key Dynamic Simulation Technology
Multi-Software Collaborative Simulation
Coal flow loading utilizes EDEM discrete element simulation (particle scaling in proportion)
Mechanical-Electrical Coupling Model
Establishing state-space equations to describe the coupled behavior of motor-reducer-sprocket systems
Fault Condition Simulation
3.4. Innovation Design Highlights
The Semi-Straight Drive System: Gearbox transmission ratio optimized to 1:5.6, balancing compactness and overload capacity.
Digital Twin Interface: Supports real-time transmission of 12 parameters including vibration, temperature, and current, enabling the construction of wear-resistant composite five-dimensional models. Utilizes a framework of physical entity-virtual model-twin data-service system-connection interaction to achieve millimeter-level precision mapping through industrial internet.
Based on your requirements, and considering the control specifications for underground coal mining machines, hydraulic supports, and scraper conveyors, as well as the technical features of the Siemens S7-1200 PLC system, I have integrated the following technical solution for you:
PLC Core Unit
Recommended Model: CPU 1214C DC/DC/DC (6ES7214-1AG40-0XB0)
Feature: Integrated 14-point digital input/10-point output, supports PROFINET communication
Enhanced Capabilities: Expandable up to 8 I/O modules and 3 communication modules.
2. Memory Card Configuration
Utilizing a 4GB industrial-grade SD card
Function: program transmission, firmware upgrade, internal memory expansion
Compatibility: Supports TIA Portal V17 and above
Power System
Input Voltage: 24VDC (Meets Coal Mine Explosion-Proof Requirements)
Power Module: PM 1207 (6EP1332-1SH71)
Backup Battery: BB 1297 Battery Panel (Retention Time ≥ 200 Hours)
Software Development Environment
TIA Portal V17 SP1 (including STEP 7 Basic/Professional)
Support Features: Multi-device collaborative programming (coal mining machine + hydraulic support + scraper), hardware configuration control function (modify hardware configuration through WRREC command), process instructions (including PID control, motion control, etc.)
2. Program Architecture Design
Modular Programming Structure: OB block: main program loop execution, FB/FC blocks: equipment-specific function encapsulation, DB block: data sharing area, supports online modification and remote download
Equipment Communication: Coal mining machines, hydraulic supports, and scraper conveyors utilize PROFINET IO communication.
One I/O controller (primary PLC) supports up to 16 I/O devices.
Communication cycle can be configured from 1 to 8 ms
Wireless Communication Alternative: DTD418M Wireless Terminal (as an Alternative to Wired PROFINET)
2. Master station communication
Support Protocols: OPC UA (based on TSN - Time-Sensitive Networking), Modbus TCP, S7 Communication (for Siemens HMI Integration)
Data Interaction Method: Automatic Mapping of Process Image Area, Direct Access to Data Blocks
3. Third-party Device Integration
Through EtherCAT to CANopen gateway, integrating domestic servo systems
Configuration Steps: Import ESI file into TIA Portal, Set PDO/SDO Mapping Parameters
Hardware Protection Mechanism
Watchdog timer (default 150ms), automatic saving of persistence data in case of power failure, SD card write protection switch
2. Software Fault Tolerance Design
OB block error handling (such as OB80, OB82, etc.), data validation mechanism (CRC16 check), configuration control data record backup (record 196)
3. Explosion-proof adaptability, in compliance with GB3836.1-2021 requirements for explosive environments, optional intrinsically safe I/O modules (e.g., SM 1226 IS)
Debugging Process: Initial virtual debugging via PLCSIM Advanced
Stage-by-stage Implementation: Single Machine Commissioning (individual equipment), Interlinked Commissioning (PROFINET network), System Integration Commissioning (involving HMI and SCADA)
2. Document Management: Utilize TIA Portal's version control features, save hardware configuration data records (including slot status information), and maintain communication topology diagrams (including IP address allocation tables)






b2b.china9.net © Zhongshang 114 Hebei Network Technology Co., Ltd.Address: Room 6009, Oriental New World Center, No.118 East Zhongshan Road, Qiaoxi District, Shijiazhuang City, Hebei ProvincePlatform Service Hotline: 4006299930