
















Direct Current Motor
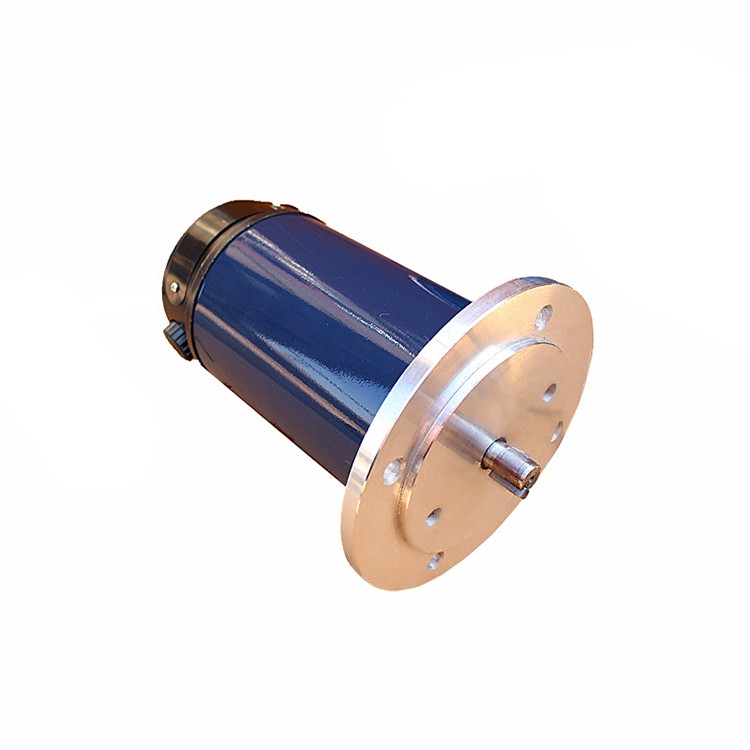
I. Structure
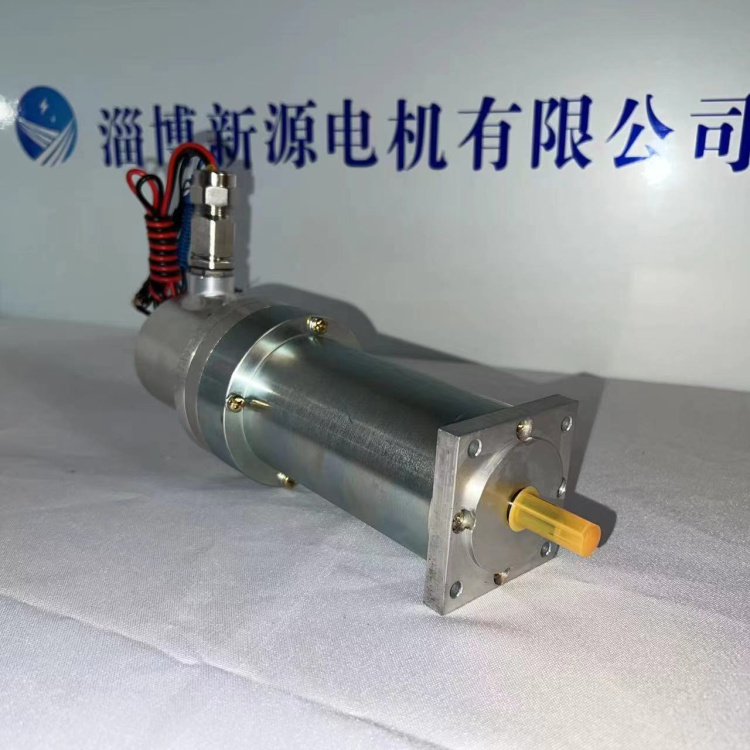
The motor's structure should consist of two main parts: the stator and the rotor. The stationary part during operation is called the stator, which primarily generates the magnetic field. The rotating part during operation is called the rotor, which primarily generates electromagnetic torque and induced electromotive force, serving as the hub for energy conversion in DC motors. It is mainly composed of a rotor made of permanent magnet materials, a stator with wound coils, and a position sensor.
The main rotor is the rotating part of the motor's body, which generates the excitation magnetic field. It consists of three parts: permanent magnets, magnetic conductors, and supporting components.
Section II: Working Principle
Direct current (DC) power supplies power the switch circuit (driver). The driver controls the transistor switches within itself based on the feedback from the position sensor, which provides signals of the rotor's polarity and speed. This controls the supply of square-wave power to the three-phase winding of the motor stator, thereby driving the rotor to rotate.
Why Reversible?
Reversing the direction of the current can alter the direction of the magnetic field, thereby enabling the forward and reverse operation of a motor. For instance, this can be achieved by reversing the power supply or swapping the terminals of the power source. The reversibility of the motor is not limited to simple forward and reverse operations; it can also adjust the speed and direction of the motor by controlling the magnitude and direction of the current. This reversibility originates primarily from the reversibility of the magnetic field. The motor's rotor is composed of permanent magnets or electromagnets, which can generate a magnetic field. When current passes through the rotor, the magnetic field produces a torque, causing the rotor to rotate. As the rotor rotates, the direction of the magnetic field also changes. This is the fundamental principle of motor reversibility. When the direction of the current is reversed, the direction of the magnetic field also changes accordingly, altering the direction of the rotor's rotation. Simply reversing the current direction can change the rotation direction of a DC motor, enabling reversible operation.
Four: The Function of Counter Electromotive Force
The reversibility of the motor is also related to the effect of back electromotive force. When a DC motor rotates, due to the movement of the rotor, it causes a change in the magnetic field relative to the stator winding, thereby generating an electromotive force, i.e., back electromotive force, in the stator winding. The direction of this back electromotive force is opposite to that of the current.
When the motor is in the generating state, the magnitude of the back electromotive force is proportional to the speed of the rotor. If the back electromotive force is greater than the applied voltage, the motor will operate as a generator, converting mechanical energy into electrical energy. Conversely, when the applied voltage is greater than the back electromotive force, the motor will operate as a motor, converting electrical energy into mechanical energy.