

DC High-Power Series Wound Motor
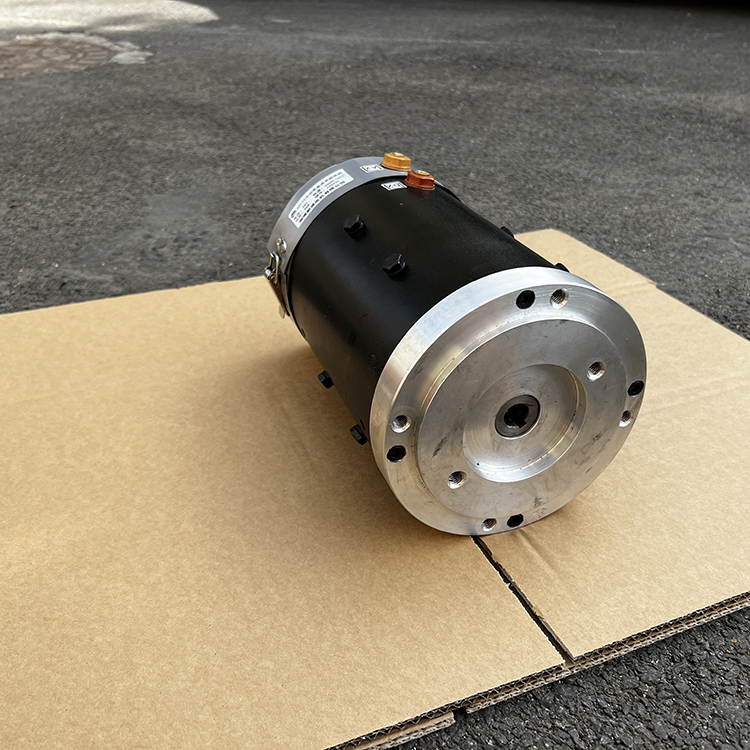
I. Principle and Structure
The working principle is identical to that of a DC motor, which can be fully explained by the left-hand rule and the right-hand rule. The motor is mainly composed of three parts: the stator, rotor, and bracket. The stator consists of a salient pole iron core and a field winding, while the rotor is made up of a hidden pole iron core, armature winding, commutator, and shaft. The field winding and armature winding form a series circuit through the commutator and brushes.
Section 2: Stator Wiring
The stator winding is in series with the armature winding; thus, the stator current is the armature current, and the magnetic flux φ produced by the stator is almost in phase with the armature current. If the load on the motor increases during operation, both the current and the magnetic flux increase, but the speed decreases, maintaining a constant output power. P2 = Mxn / 9.55 (W), where M is the torque (N.m) and n is the speed (rpm).
How to Reverse
Switch the two wires of the carbon brush; the direction of some induction motor rotors is determined during the winding process. If the method of changing the carbon brush wiring does not work, the rotor's direction cannot be altered.
It is a series connection of the stator winding and the rotor winding. DC motors can be categorized by the type of excitation into: series-wound, shunt-wound, compound-wound, and separately excited. Series-wound is just one type of excitation principle in DC motors. This type of motor is mainly used in electric tools and falls under the category of AC/DC dual-purpose motors or DC motors.
The excitation winding of the series DC motor is connected in series with the rotor winding through brushes and a commutator. The excitation current is proportional to the armature current. The magnetic flux of the stator increases with the increase of the excitation current. The torque is approximately proportional to the square of the armature current. The speed rapidly decreases with the increase of torque or current.
The starting torque can reach more than five times the rated torque, and the short-time overload torque can exceed four times the rated torque. The speed variation rate is significant, and the no-load speed is very high. Speed regulation can be achieved by either串联 an external resistor with the series field winding or by paralleling the series field winding.
IV. Structure
The motor is mainly composed of three parts: the stator, rotor, and bracket. The stator consists of a salient pole iron core and excitation winding. The rotor is made up of a hidden pole iron core, armature winding, commutator, and shaft. The excitation winding and armature winding form a series circuit through brushes and a commutator.
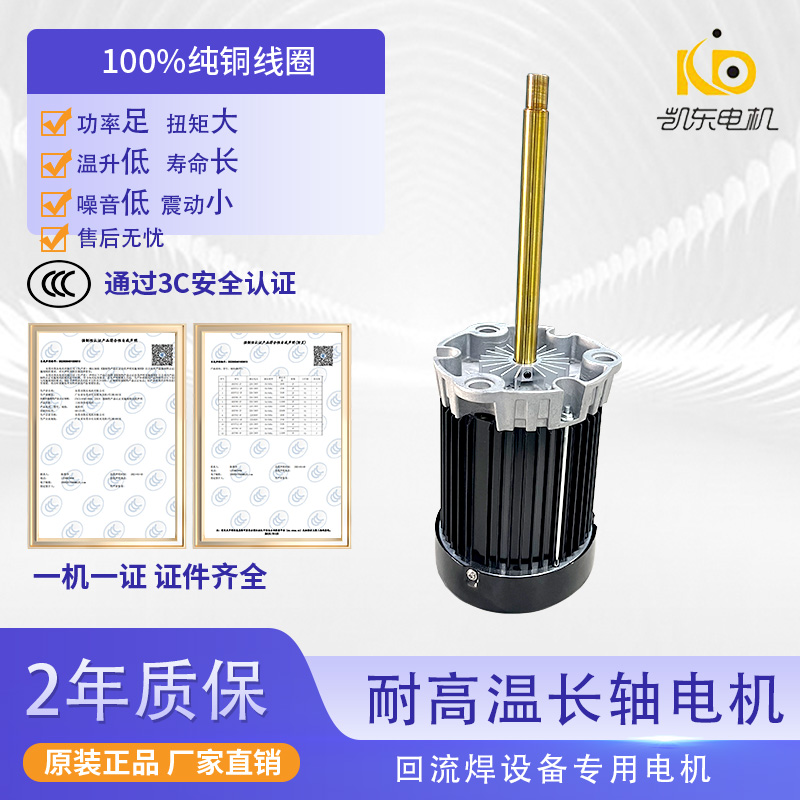
Section 5: Application
Series motors, due to their wide adjustable speed range and high starting torque, are widely used in electric tools, kitchenware, and floor care products. In fact, the main purpose of using reduced voltage starting is to avoid affecting the normal operation of other equipment. If there are no other devices, only transformers and motors, the motor's power can be close to the transformer's capacity. Considering factors such as power factor and efficiency, the motor power is generally 80% of the transformer capacity and can be started directly, or both the transformer and motor can be started simultaneously. In reality, for most large motors, there are usually other loads, so the amount of these loads is also a factor to consider.