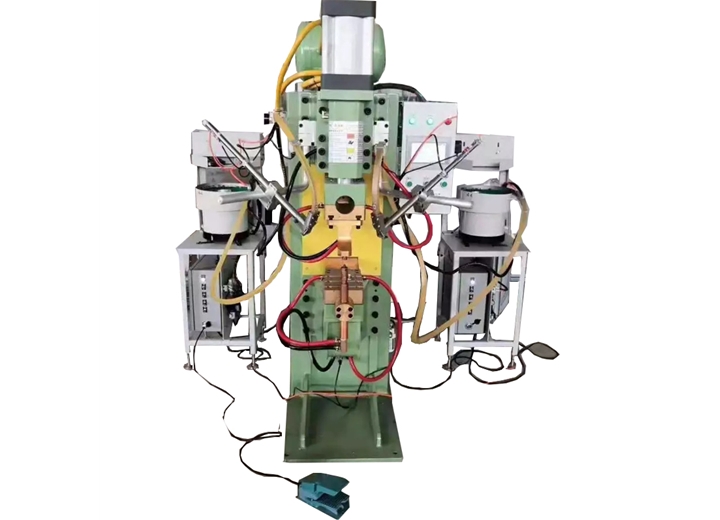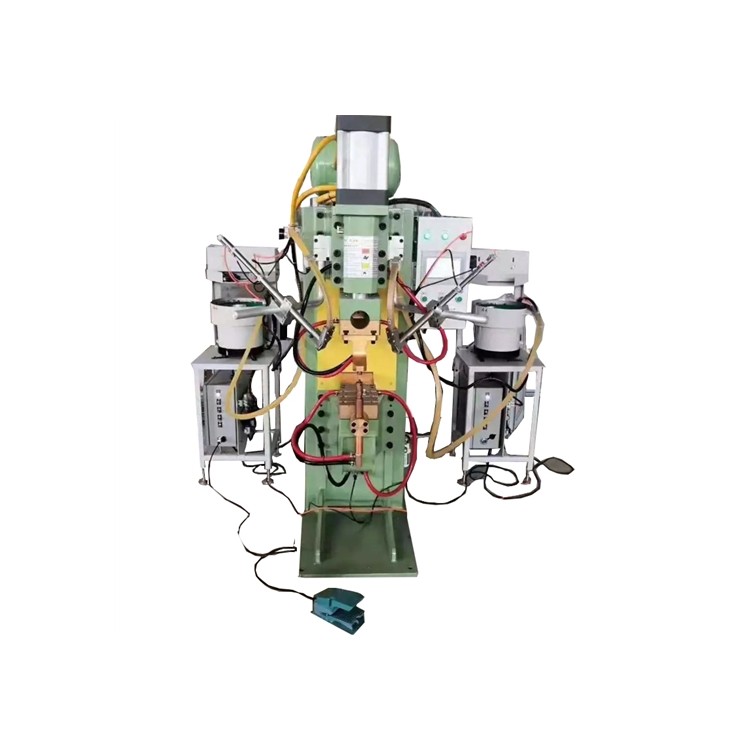















1. An automatic welding and cutting machine control system for soft copper wire, including a PLC control system, an automatic gripper cutting system, a spool feeding stand system, a medium-frequency inverter DC spot welding machine system, and a soft wire clamping system, characterized in that: the output end of the PLC control system is connected to the input end of the medium-frequency inverter DC spot welding machine system.
The automatic gripping and cutting system for the said manipulator consists of pneumatic fingers, a cutting mechanism, a horizontal advancement mechanism, a lower positioning mechanism, and a positioning stroke mechanism.
The reel feeding架 system consists of a photoelectric sensor, a feeding rotation motor, and upper and lower stroke limit frames.
The soft-line clamping system consists of guide rods, clamping cylinders, and clamping brackets.
The output end of the mentioned PLC control system is connected to the input end of the robotic arm automatic gripping and cutting system. The output end of the robotic arm control system is connected to the input end of the pneumatic fingers, the cutting mechanism, the horizontal propulsion mechanism, the lower positioning mechanism, and the positioning stroke mechanism.
The output end of the PLC control system is connected to the input end of the spool feeding架 system, the output end of the spool feeding架 system is connected to the input end of the photoelectric identifier, the input end of the feeding rotation motor, and the input end of the up and down stroke limit frame.
The output end of the PLC control system is connected to the input end of the soft-line clamping system, and the output end of the soft-line clamping system is connected to the input end of the clamping cylinder.
2. An automatic welding and cutting machine control system for a soft copper wire as claimed in claim 1, characterized in that the upper and lower stroke limit brackets are composed of an attached wheel, a driven wheel, and a wire break stop sensor.
3. A full-automatic welding and cutting machine control system for a soft copper wire, as claimed in claim 1, characterized in that: said soft wire clamping system is installed on an insulating platform, between the upper and lower electrode soft wires; said soft wire clamping system is clamped by means of a clamping cylinder and a clamping bracket to the upper and lower electrode soft wires.
Manual
A full-automatic welding and cutting machine control system for soft copper wire
Technical Field
This novel type is an automatic welding and cutting machine control system for soft copper wire, specifically a soft copper wire automatic welding and cutting machine, widely used in industries such as automotive accessories, electrical carbon, and electrical switches.
Background Technology
Copper connecting wires are woven with soft copper wire and copper stranded wire, requiring焊接hot synthesis dense copper squares. Welding and cutting from 5mm² to 30mm² can be achieved on this equipment. Different wire diameters allow for easy replacement of the upper and lower electrodes, and the adjustment of welding cutting length and pitch is convenient and flexible. Currently, the process involves manual cutting followed by welding, with two separate steps completed. However, the appearance is discolored, the oxidation断面is uneven, the workpiece temperature is high, causing some harm to the operator, and the efficiency is low, consuming a large amount of manpower and material resources. Therefore, a fully automatic welding equipment that integrates wire preparation and welding cutting is required.
Novel Utility Content
In response to the deficiencies in existing technology, the purpose of this utility model is to provide an automatic soft copper wire welding and cutting machine control system to address the issues raised in the aforementioned background technology. The system is user-friendly, easy to operate, stable, and highly reliable.
To achieve the aforementioned objectives, this utility model is implemented through the following technical solution: an automatic soft copper wire welding and cutting machine control system, including a PLC control system, an automatic robotic gripper cutting system, a reel feeding stand system, a medium-frequency inverter DC spot welding machine system, and a soft wire clamping system. The output end of the PLC control system is connected to the input end of the medium-frequency inverter DC spot welding machine system. The automatic robotic gripper cutting system is equipped with pneumatic fingers for cutting.