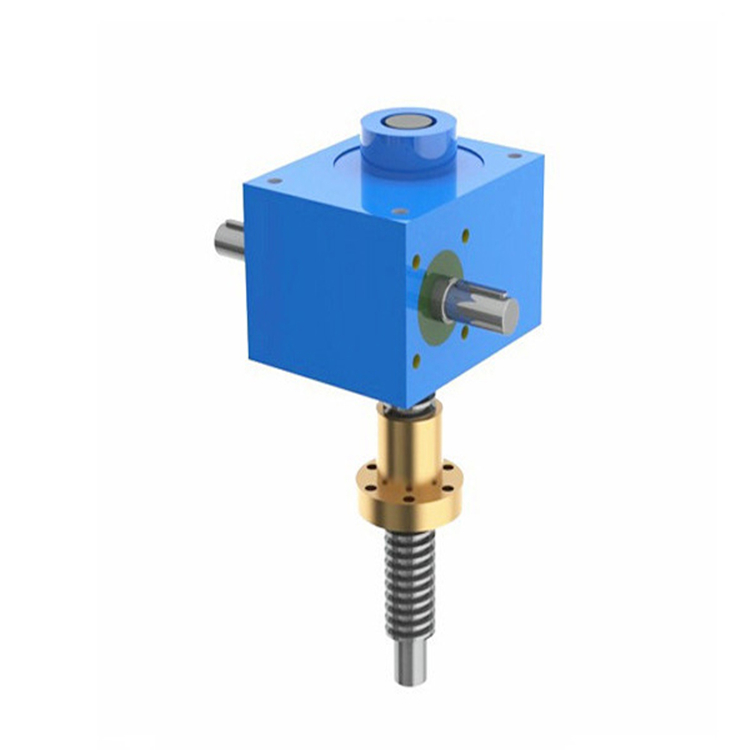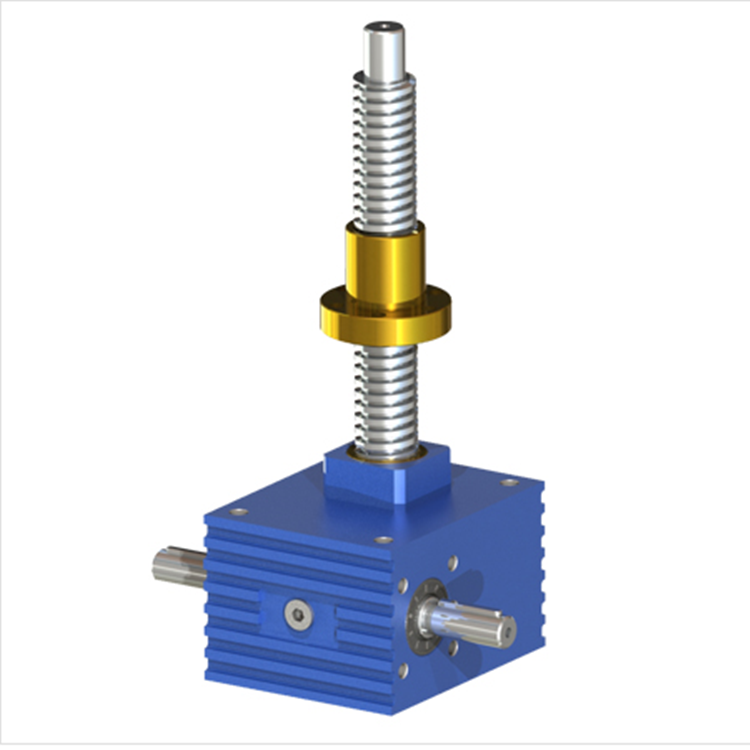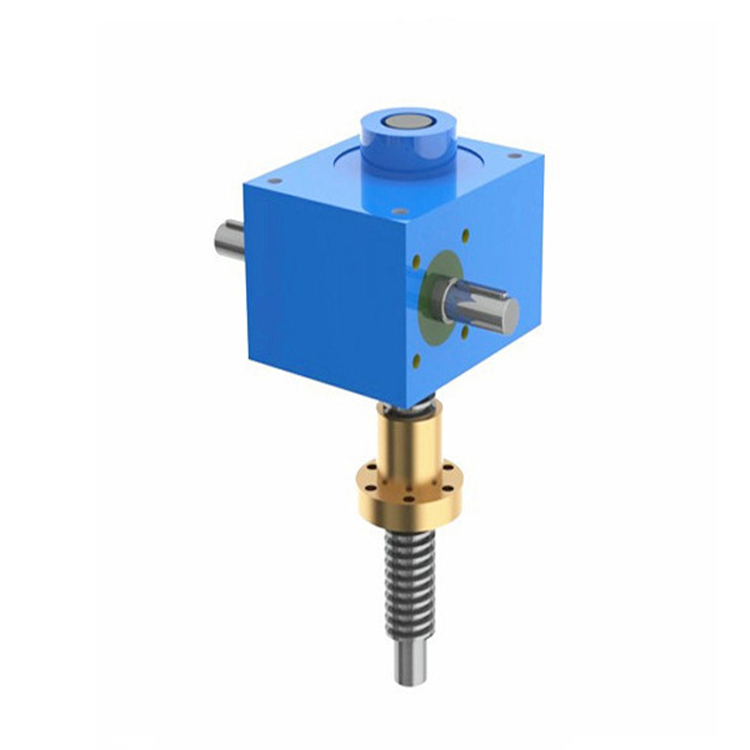
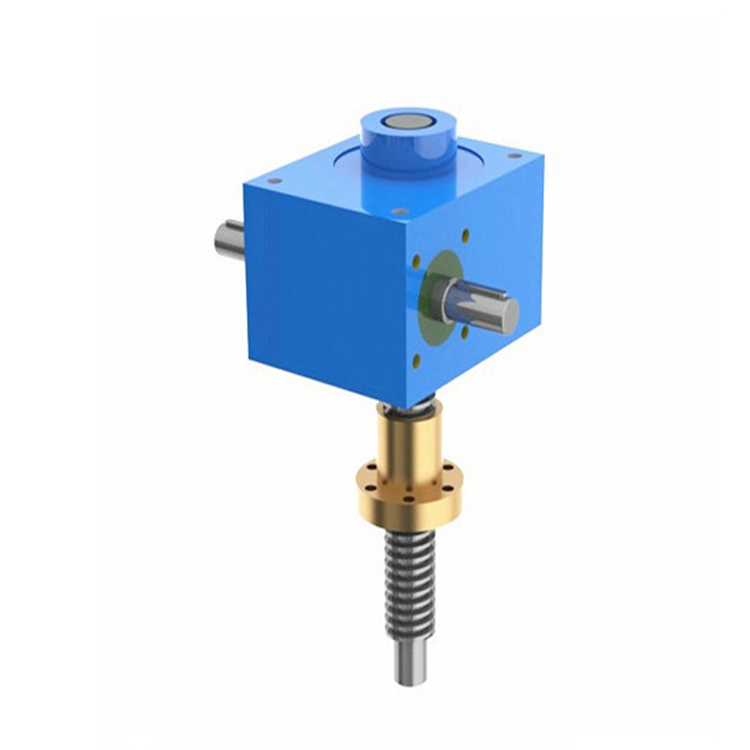

















The screw jack, also known as a helical drive mechanism, is primarily used to convert rotational motion into linear motion or vice versa. There are types that are mainly for transmitting motion, such as the feed screw of machine tool worktables, as well as those for adjusting the relative positions of parts, etc. The screw jack consists of a worm gear reducer and a screw, with the reduction component being the worm drive, which uses the worm to drive the worm gear for deceleration. The worm gear is equivalent to the nut of the lifting screw and matches with it.
Features of screw jack:
1Ball bearings are placed between the screw thread and nut thread grooves.
2As the screw or nut rotates, the ball bearings roll along the thread groove, generating rolling friction between the screw and nut during relative motion. To prevent the ball bearings from rolling out of the groove, return guide devices are installed at both ends of the nut's helical slots.
3They form a circulating loop with the threaded raceway, allowing the ball to circulate within the nut's raceway.

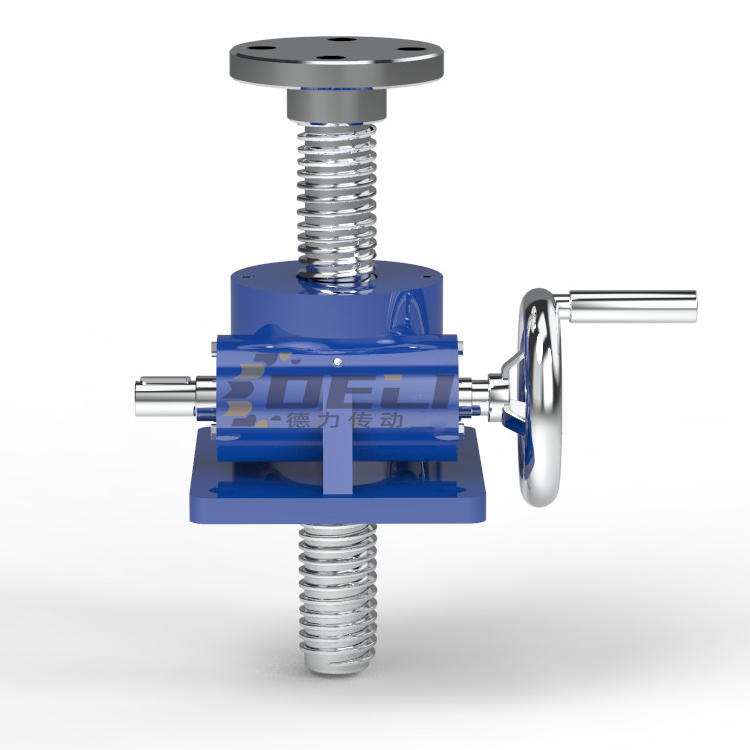
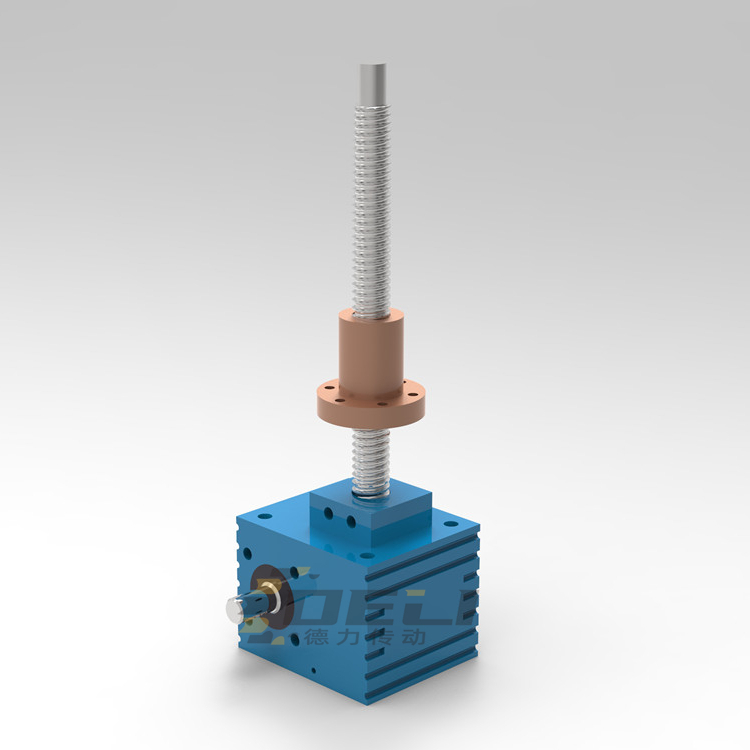
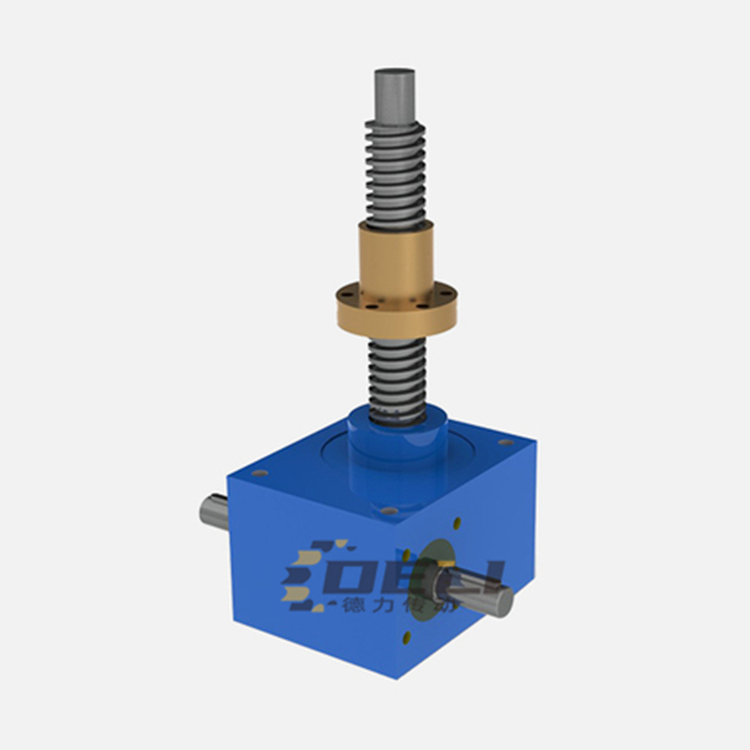
The SJ worm gear screw jack is a lifting component.Compared to other series of screw jacks, this model boasts many advantages such as a compact structure, small size, easy installation, diverse input forms, high reliability, and long lifespan. It features lifting and lowering functions, as well as reverse operation with shaft components. It can be used individually or in combination with multiple units. The product can be powered by an electric motor or other drive devices, or manually operated. It is widely applied in metallurgy, machinery, hydrology, chemical industries, and more.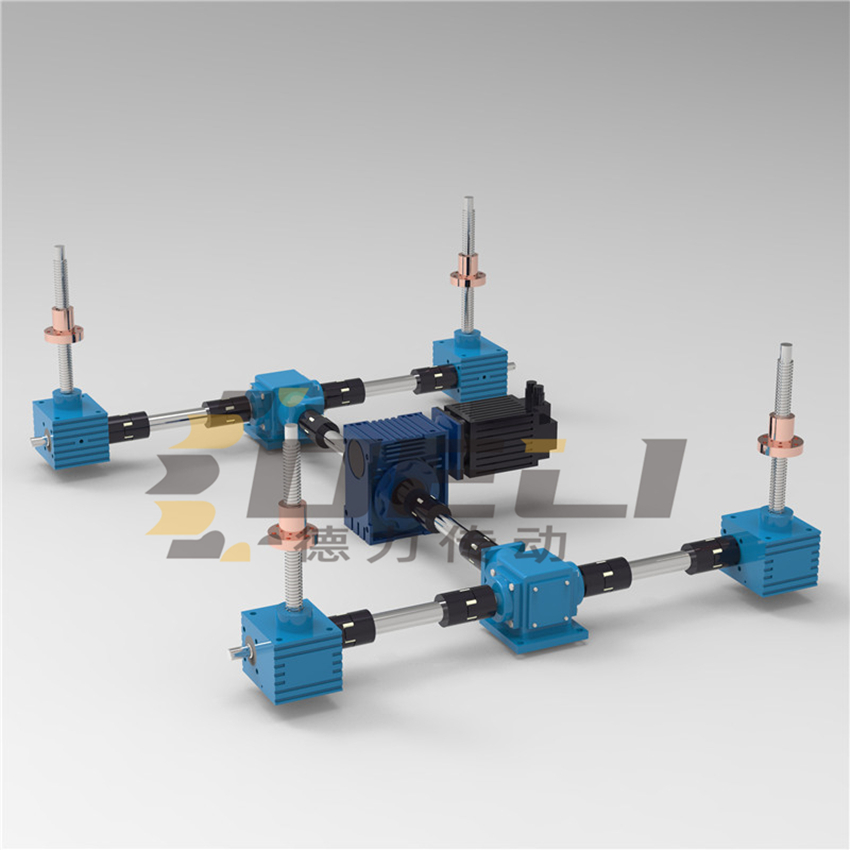
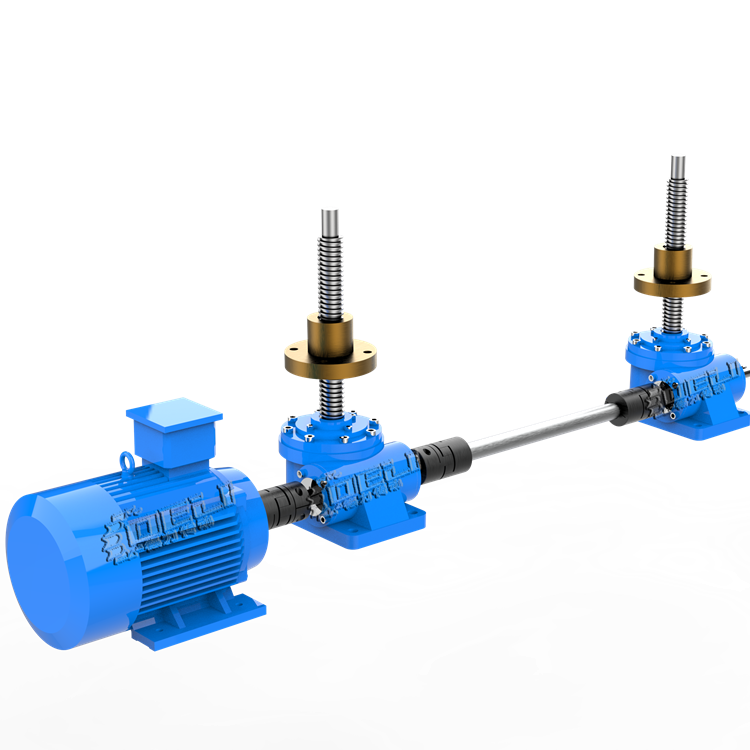
Screw jack linkage platform
The worm screw lifting machine work platform consists of one or more lifting screws, powered by an electric motor (or handwheel) and coordinated with other components for synchronized and smooth lifting and lowering.
For screw jack work platforms, whether it's a two, three, or four-way drive, we recommend using a single motor to power them as much as possible. This is because each motor has a different RPM, making it challenging to achieve synchronization and stability with multiple drives.
Common combinations of screw jack platforms include two, four, eight units, etc. Two units are interconnected.I and T models are available. Compared to the T-type structure where the driving source is in the middle, the elevator experiences more even force distribution, resulting in a more stable transmission effect. Four interconnected models are available: T-type, U-type, and H-type. The H-type development model and 2H-type multi-unit combinations are also available. Customers can choose according to their own installation space and other requirements. For more selection options, please consult our technical staff.