
















Product Features of Spiral Screw Lifters:
Standardization and serialization
2. The high-speed shaft can rotate in both clockwise and counterclockwise directions.
3. Suitable for low-speed, low-frequency applications; primarily composed of: precision trapezoidal screw and nut sets, and high-precision worm and worm gear sets.
4. Low speed, low frequency: Primarily used in high-load, low-speed applications that do not require frequent operation.
5. Maintain Load Capacity: The trapezoidal screw features an automatic locking function, allowing the load to be maintained even without a braking device.
Note: Under significant vibration or impact loads, the self-locking function may fail. Please add an external braking device.
Technical Specifications:
Speed Enhancement: 150mm/min to 1800mm/min
2. Input Power: 0.55-17.5 kW
Pitch range: 6-25mm
4. Load Range: 2.5T-120T
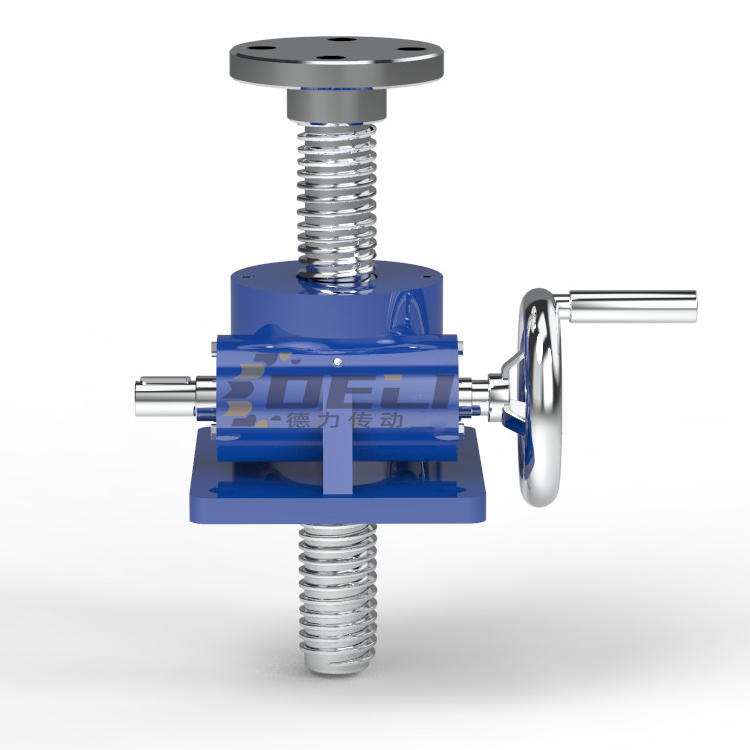
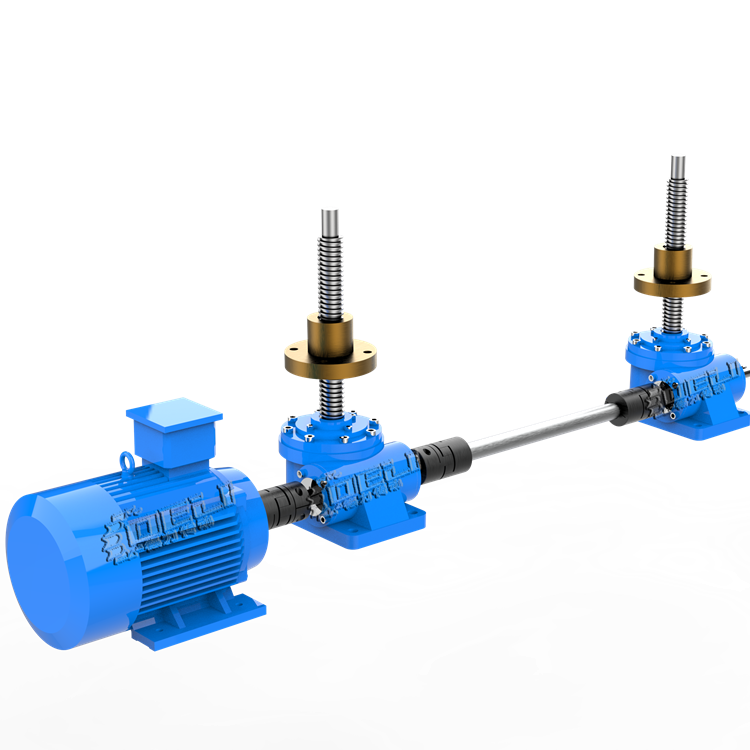
5. Structural Type: Directly coupled motor, Single input shaft, Dual input shaft.
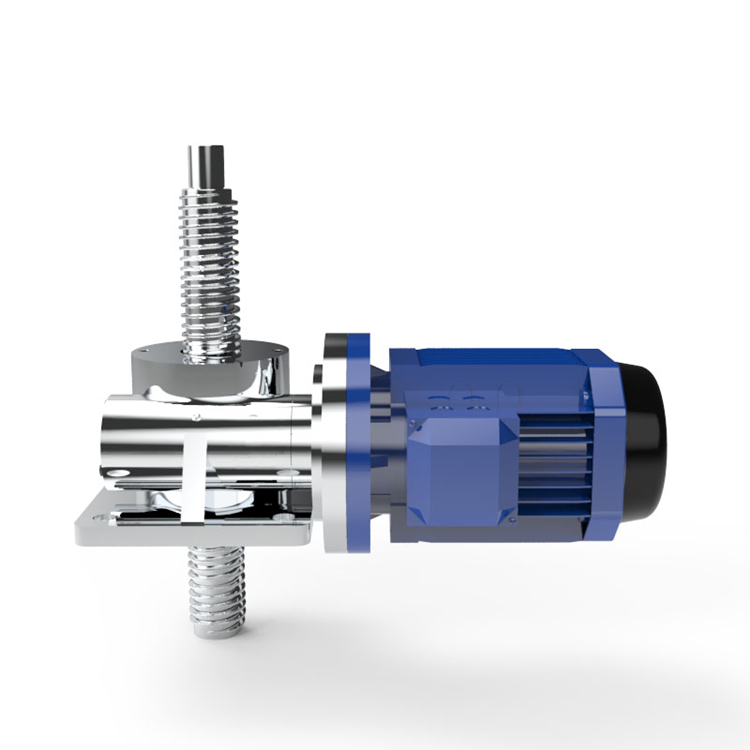
SWLScrew JackIt is a fundamental lifting component, utilizing worm gear and screw mechanisms for lifting, lowering, propulsion, and inversion functions, and is listed in the JB/T8809-1998 standard. Widely used in various industries such as machinery, metallurgy, water conservancy, chemicals, culture, and health, it boasts a compact structure and small size.Lightweight, easy to install, flexible usage, high reliability, stableHigh efficiency, long service life, and other advantages, can be directly driven by an electric motor or other power sources, and can also be operated manually. This series of worm gear screw lifters can be self-locking, with high load-bearing capacity.2.5t to 120t capacity, input speed of 1500 rpm, hoisting speed of 2.7 m/min, available in various structural types and assembly methods. Operating temperature range: -20°C to 100°C. Hoisting height customizable to customer requirements.

Type:
2.1 Structural Style
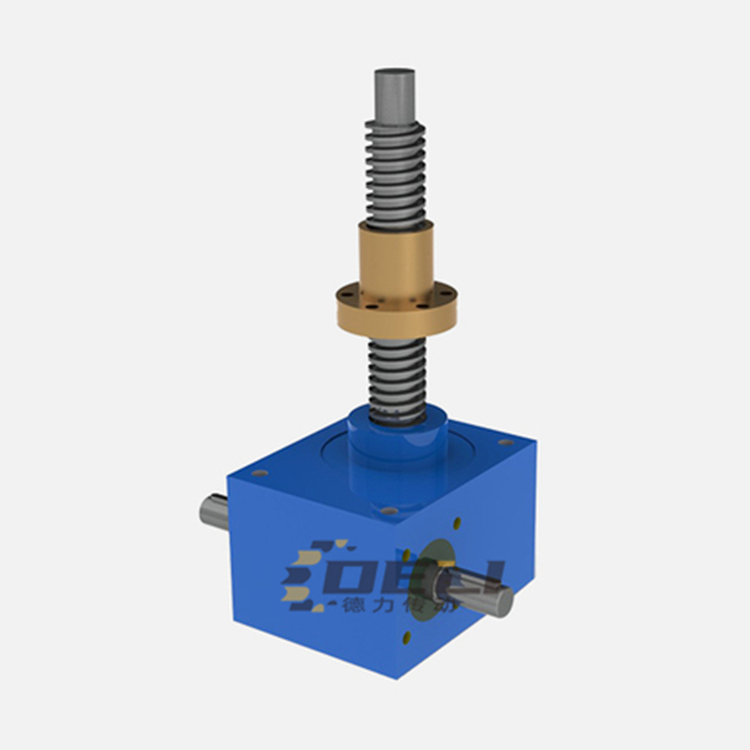
Type 1 - The worm and screw are connected by threads, with the screw moving axially.
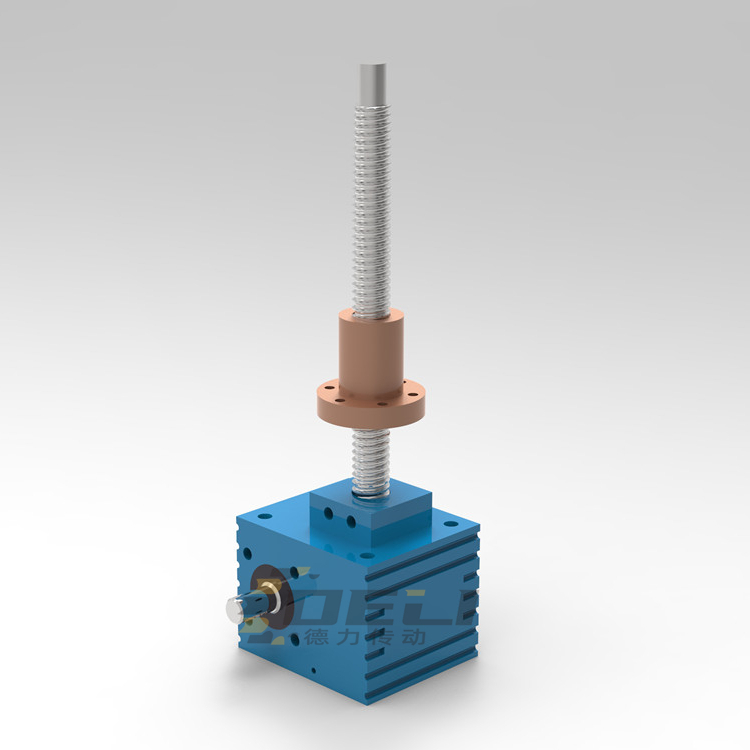
Model 2 - The worm and screw are keyed connected, with a nut fitted on the screw. The screw rotates, while the nut moves axially.
2.2 Assembly Type
Each elevator structure type is further divided into two assembly types:
Type 1 structural style has two assembly types:
2 models of structural types have two assembly styles:
Type A: Screw working end on top; moves upwards. Type A: Screw working end on top, nut is lifted or pulled down.
B Type: Screw working end down, moving downward. B Type: Screw working end down, nut pressed down or pulled up.