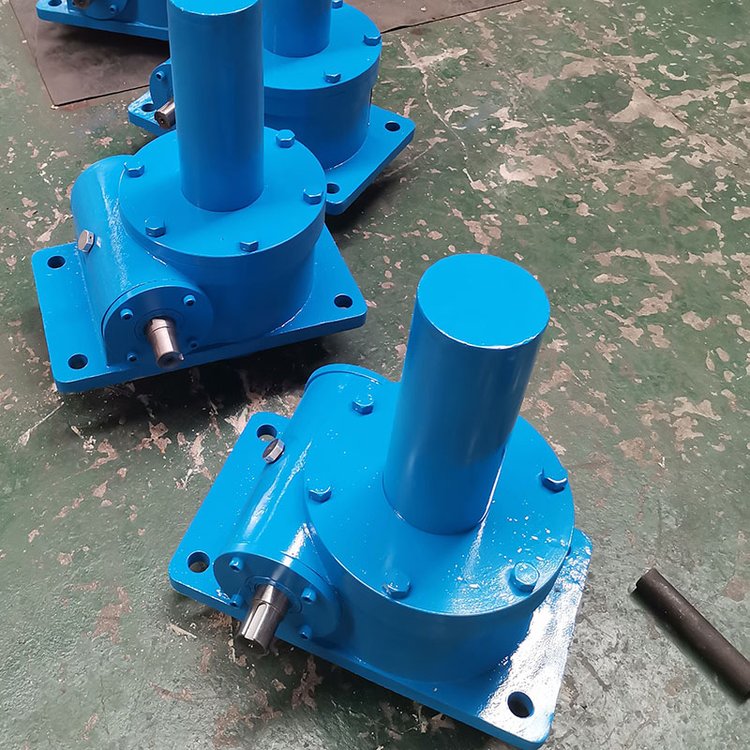
The screw lift is composed of components such as worm gears, housing, bearings, and screw shafts. Its working principle is as follows: the motor or manual drive rotates the worm, which in turn drives the worm gear to rotate at a slower speed. The inner cavity of the worm gear is machined into an internal thread, driving the screw shaft to move up and down. Due to the presence of worm gears within, the screw shaft's reduction function amplifies the thrust.
Feature: By rotating the worm gear, it achieves the vertical movement of the screw rod, enabling pulling, pushing, or lifting.
1. Standard thread screw electric push rods and screw jacks with self-locking performance, due to low comprehensive transmission efficiency, most have anti-impact self-locking functions, enhancing the safety of equipment operation; ball screw electric push rods and screw jacks do not self-lock.
2. The positioning accuracy of the degree positioning reaches up to 0.1mm; the positioning accuracy of the servo electric cylinder can reach 6um.
3. Control the encoder configuration, achieving closed-loop positioning through a variable frequency drive or controller; if precision requirements are not high, a potentiometer can be equipped for on-line control.
4. The synchronous single-reduction motor drives multiple push rods simultaneously through mechanical coupling, achieving synchronized lifting and lowering as well as synchronization.
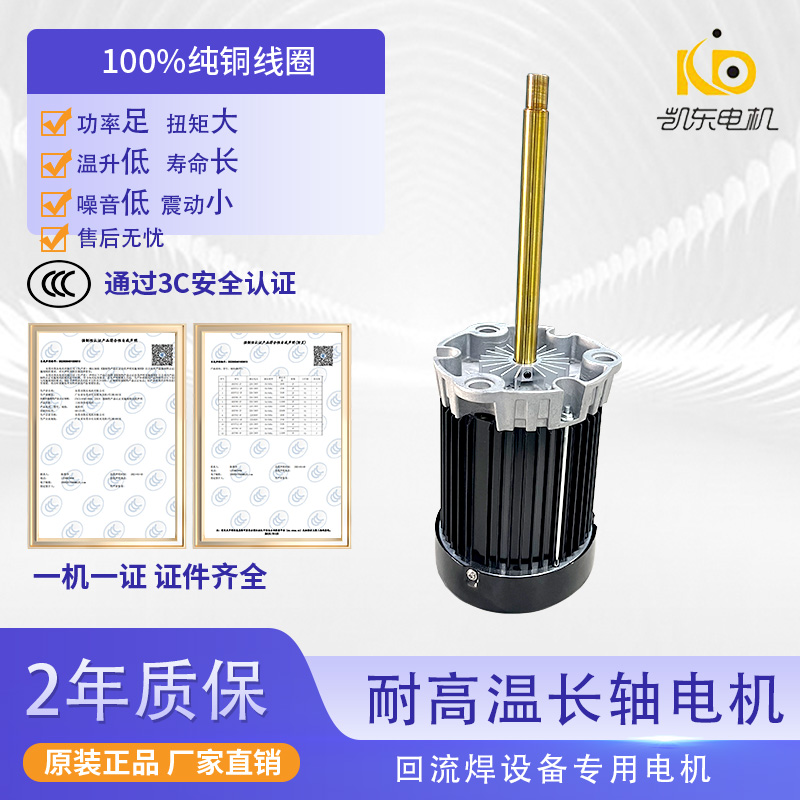
5. Drive System: DC motor 12/24V, single-phase AC motor, three-phase AC motor; no air/hydraulic source required.
6. Overload protection can be equipped with a safety clutch to prevent overload; an overload pressure sensor can also be added to prevent overload.
7, High load push/pull force up to 300 tons.
8. Other maintenance is simple, low noise, and can operate normally in high/low temperature, anti-corrosion/explosion-proof harsh environments.
Key features include: self-locking performance, synchronization, degree positioning, speed control, and thrust control.