







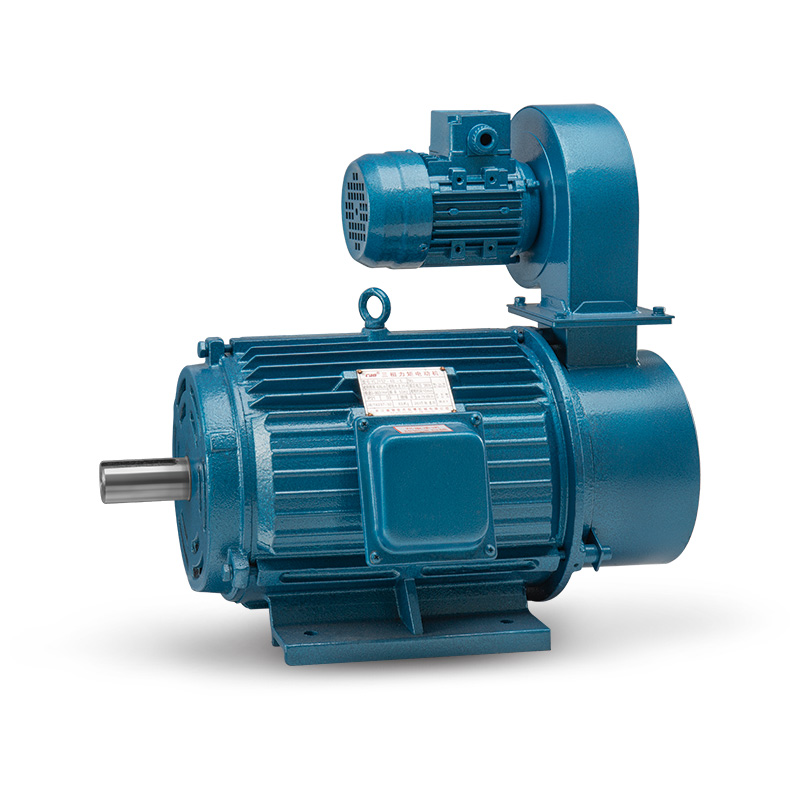










Principles and Components of Motor ProtectorsFor electric motors, their failure modes can be divided into two aspects from a mechanical perspective: winding damage and bearing damage. The main reasons for motor damage are as follows:1. Long-term exposure to electrical, thermal, mechanical, and chemical stresses on the motor causes insulation aging and damage to the windings, resulting in short circuits between turns or to ground in the stator and rotor windings. 2. Poor quality of power supply from the grid, including unbalanced three-phase voltage, significant voltage fluctuations, distorted waveform due to power grid harmonics, or phase failure in the motor operation. 3. Low supply voltage results in insufficient starting torque for the motor, making it difficult to start or causing repeated starts within a short time frame, leading to overheating due to prolonged exposure to high starting currents. 4. Mechanical failure or other causes lead to blockage of the motor's rotor. 5. Faults in the cooling system of certain large motors or failure due to long-term operation under high temperature and humidity conditions.
The research on the protective principle of electric motors is crucial for determining the performance level of motor protectors. According to the theory of three-phase symmetrical component method, three unsymmetrical vectors can be decomposed into three groups of symmetrical vectors, respectively: positive sequence components, negative sequence components, and zero sequence components. The calculation formula for symmetrical components is as follows:
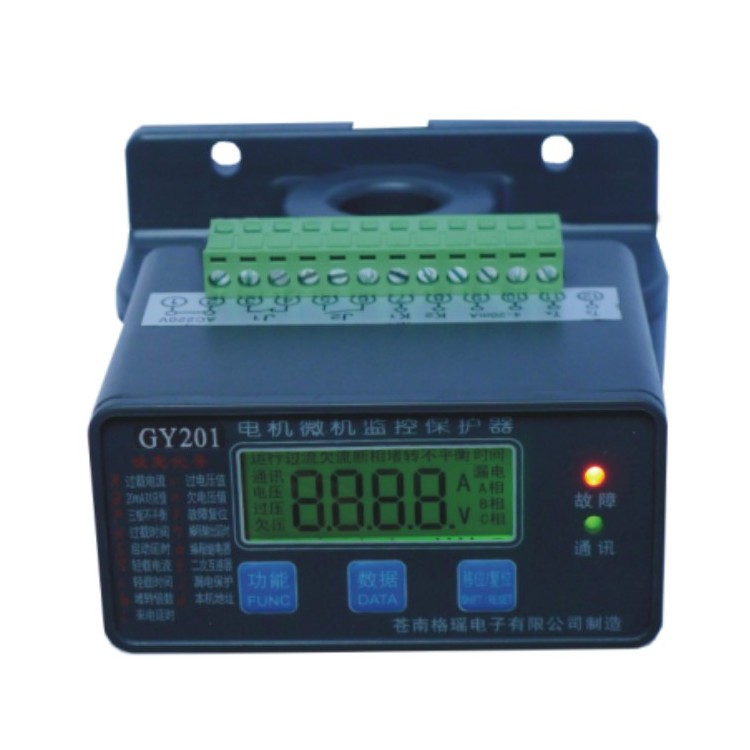
Based on1) In the event of both symmetrical and asymmetrical faults, the three-phase current of the motor will change. The current flowing through the winding of the motor fault power supply is too high, exceeding the rated current of the motor, so this characteristic can be used for overcurrent protection of the motor. Overload, phase loss, and under-voltage can all cause the winding current to exceed the rated current value. When the power supply voltage is under-voltage, the proportion of the increase in operating current will be equal to the proportion of the voltage drop; when the motor is overloaded, it often causes stalling, and the operating current at this time will greatly exceed the rated current. For these situations, the motor protector can detect the three-phase operating current, determine different protection methods based on the different characteristics of the operating current, and thereby provide power-off protection for the motor. The types of motor faults include overcurrent protection, negative sequence current protection, zero sequence current protection, voltage protection, and overheating protection. The microcomputer motor protector is a descendant product of the motor protector, featuring a large memory space, fast running calculation of the motor's operating process data, and data collection through electrical energy, providing passive contacts for protection. For more details, please call Zhejiang GeYao Science and Technology Co., Ltd.