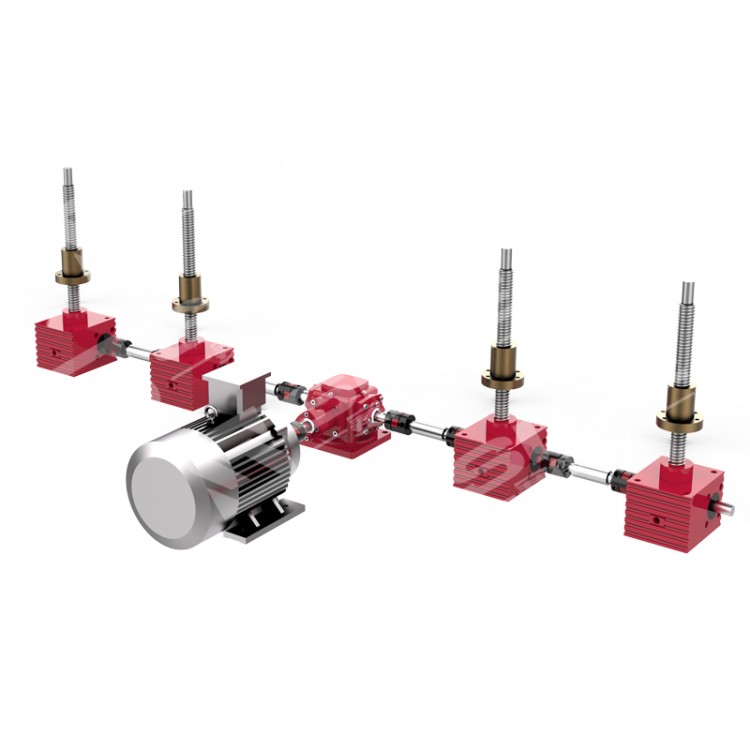













Worm gear screw elevator (ball screw elevator) is an electromechanical integrated motion execution unit that cleverly combines motors, reduction systems, screw drives, and other components. It can be used alone or combined with multiple units, like building blocks, by connecting components such as right angle steering, couplings, and connecting rods, and can accurately control the lifting, reciprocating, flipping, and other movements of the mechanism according to a certain program. Thus, it can replace traditional hydraulic and pneumatic transmissions in various situations. This motion unit, mainly composed of worm gear and screw elevators, provides a broad design space for engineers in today's digital age to develop products. Widely used in multiple industries such as solar energy, metallurgy, food, and water conservancy.
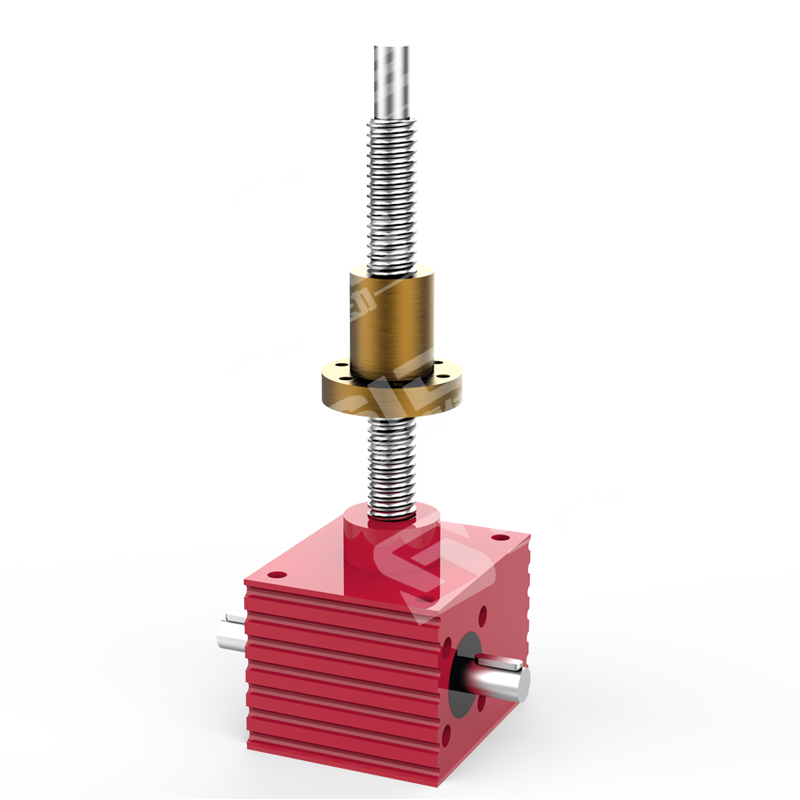
The square groove shell of SJB ball screw elevator increases the heat dissipation capacity of the shell and prolongs the service life of the lubricating grease. The selection of ductile iron shell material significantly improves the strength and performance of the shell, as well as its wide application at high/low temperatures. Square tail cover design, controlling the screw to not rotate. The processing equipment and assembly technology are guaranteed to achieve high output, and the design concept has created products with strong impact resistance, high strength, low noise, lifespan, and small size.
SJA? Both SJB and SJB belong to the SJ series screw lift, which has many advantages such as compact structure, small volume, light weight, beautiful appearance, wide range of power sources, easy installation, no noise, multiple functions, multiple supporting forms, flexible use, high performance, and long service life.
Thrust range: 0.5-30 tons
The stroke can reach 8m, taking into account the stability of the screw and the guiding mechanism
30% work schedule, if the load rate is low, the work schedule can be appropriately increased
The lifting speed is less than 1500mm/min (23mm/s), and in special circumstances it can reach 46mm/s
- Efficiency less than 33%, with self-locking function, high reduction ratio L1 self-locking
- Accurate positioning, with an additional anti backlash device that can achieve an accuracy of up to 0.05mm
- Synchronization, the same motor can drive multiple spiral elevators simultaneously, mechanical synchronization
1. Structural form? Type 1- Axial movement of screw rod
Type 2- Screw rotates and nut moves axially
2. Assembly type? Type A - The screw (or nut) moves upwards;
Type B - The screw (or nut) moves downward.
3. There are four types of screw head types: Type I (cylindrical), Type II (flange), Type III (threaded), and Type IV (flat head); The screw head of the Type 2 structural form is divided into two types: Type I (cylindrical) and Type III (threaded).
4. Transmission ratio: normal speed ratio (P), slow speed ratio (L)