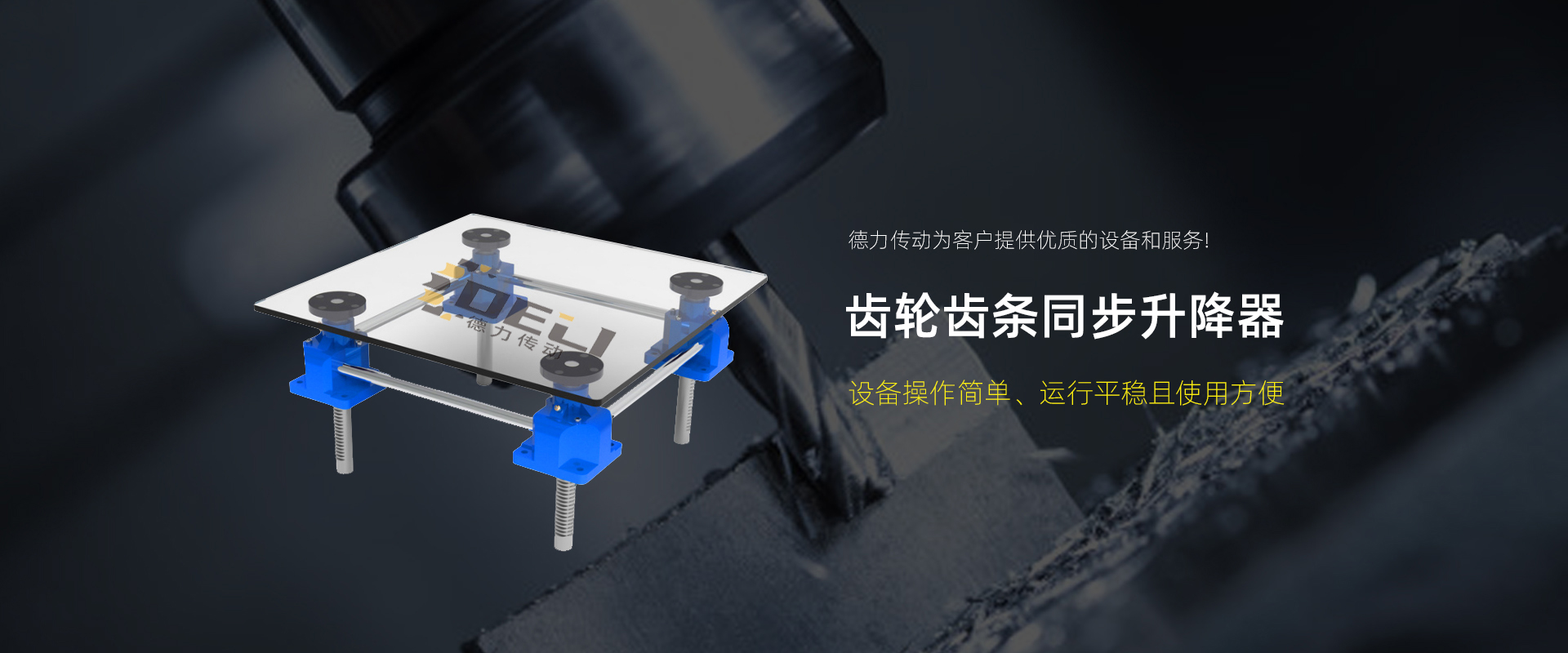

The worm screw lifting jack consists of a combination of worm and screw gears, where the internal thread of the worm mates with the screw to perform axial motion. It is primarily used to convert rotational motion into linear motion or vice versa, thereby accomplishing the lifting, pulling, and flipping of objects.
The major feature of the worm screw lifting jack is its self-locking function. When the lead angle of the worm is less than the equivalent friction angle between the mating gear teeth, the mechanism has self-locking properties, allowing for reverse self-locking, meaning that the worm can only drive the worm gear, not vice versa. The self-locking function effectively protects the equipment's operation, but it is important to note that in environments with significant vibration and impact, the self-locking function of the lifting jack may fail. Therefore, an additional braking device or a drive source with built-in braking should be considered.
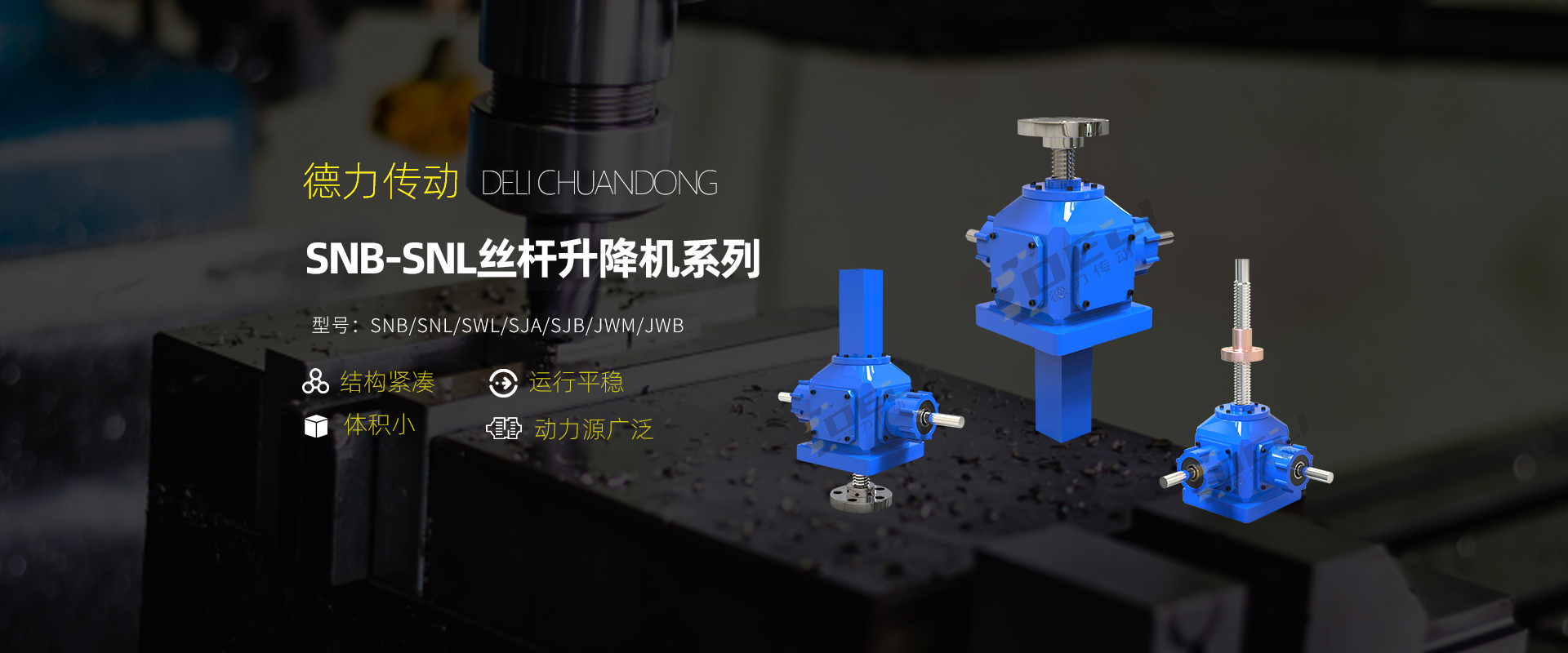
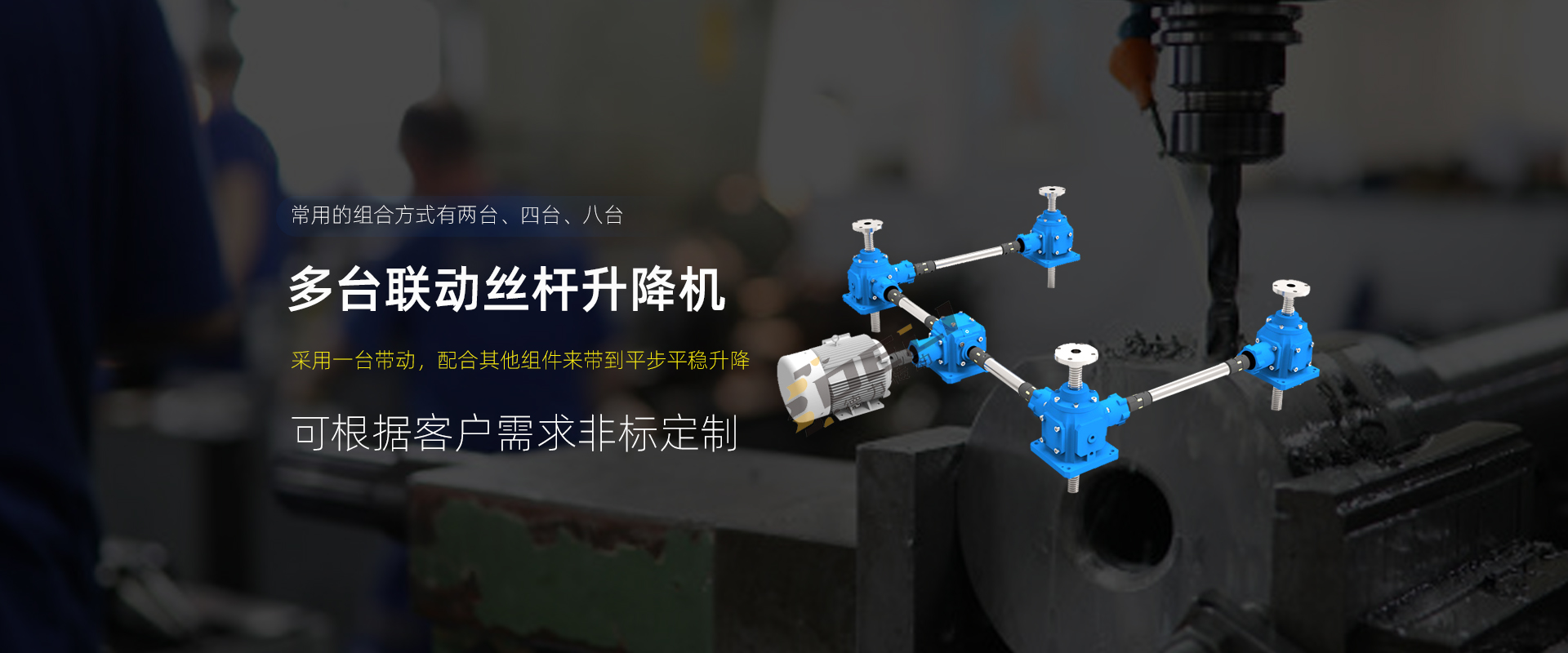
Transmission forms are based on the relative motion combination of the screw and nut. The basic transmission forms of screw lifters have two types.
(1) Nuts secure the fixed position, while the screw shaft rotates and moves. This transmission method, where the nut itself serves as a support, eliminates the additional axial movement that may be caused by screw shaft bearings. The structure is relatively simple, allowing for higher transmission accuracy. However, its axial dimensions should not be too long, as this would reduce its rigidity. Therefore, it is only suitable for applications with shorter travel distances.
(2) The screw rotates and the nut moves; this type of transmission requires limiting the nut's rotation, thus necessitating a guiding device. Its features include a compact structure, good screw rigidity, and is suitable for applications with a large working stroke.
The screw jack is widely used in various industries such as machinery, metallurgy, construction, chemical industry, culture, and health. It can accurately control and adjust the lifting or advancing height according to a certain program. It can be directly driven by an electric motor or other power sources, or operated manually.


