
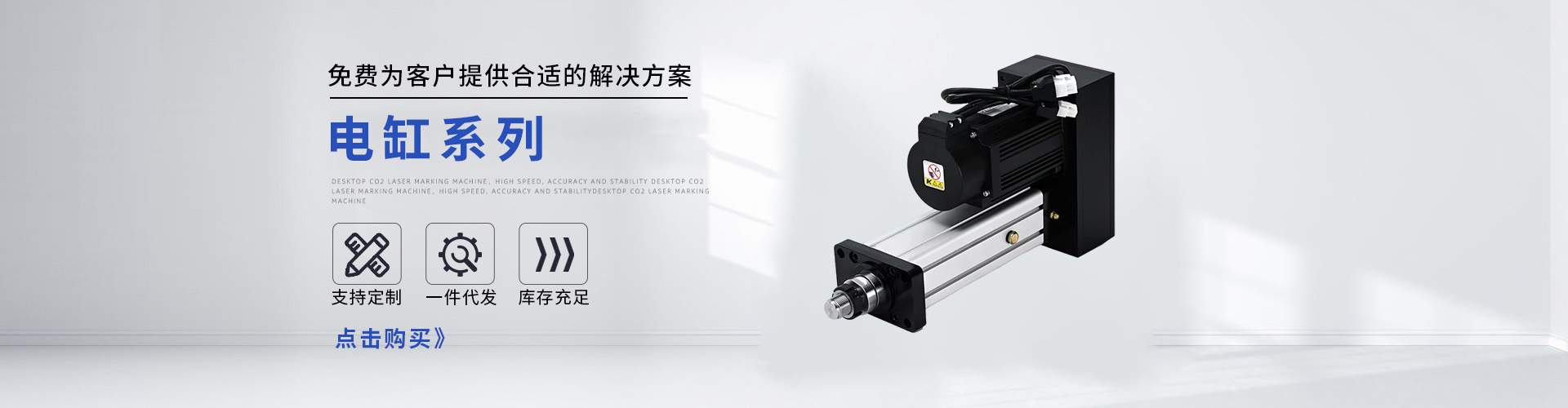



The six-degree-of-freedom motion platform is a dynamic simulation device used for aircraft and mechanical simulation training (such as aircraft and vehicles). It is a parallel motion mechanism. It achieves vertical, horizontal, longitudinal, pitch, roll, and sway movements of the platform, including translations in the X, Y, Z directions and six degrees of freedom of spatial motion around the X, Y, Z axes, through the adjustment of six telescopic electric cylinders.
The six-degree-of-freedom platform features the following:
The six-degree-of-freedom platform is supported simultaneously by six cylinders. It boasts a high structural rigidity and stability, superior to that of a series cantilever structure. With the same weight and volume, its load-bearing capacity is greater than that of a series mechanism.
(2) The error on the end pieces of the series mechanism accumulates and amplifies the errors of each joint, resulting in low precision and large errors. In contrast, the six-degree-of-freedom platform of the parallel mechanism does not experience cumulative and amplified errors, hence it has smaller errors and higher precision.
(3) The six-degree-of-freedom platform features a symmetrical structure with good isotropy.
(4) In position solutions, it is easy to find the direct solution for series mechanisms but difficult to find the inverse solution. Conversely, for a parallel mechanism's six-degree-of-freedom platform, it is difficult to find the direct solution yet easy to find the inverse solution. In real-time online calculations, the inverse solution is required, making the parallel mechanism more feasible in such scenarios.
